Japan on the Moon
February 17, 2024 | Expert Insights

On 6 September 2023, Japan Aerospace Exploration Agency (JAXA) launched Smart Lander for Investigating Moon (SLIM), with the mission to analyse rocks and materials on the Lunar surface.
The ability to land with pinpoint accuracy sets the SLIM apart from earlier lunar landings. This landing technology cut weights for higher functional observational equipment to aid in landing on resource-scarce planets, keeping an eye on future solar system research probes. An increased knowledge of target astronomical objects and bodies and the details to be studied have grown more distinctive.
SLIM successfully landed just south of the Moon's equator at 0:20 am JST on 20 January 2024, approximately 55m east of the original target landing site (the slopes approaching Shioli Crater).
Background
A smooth area for landing is always necessary, which makes Cheng 4’s landing site highly attractive (Von Kármán crater). However, JAXA reports that at an approximate altitude of 50m and just before the start of the obstacle avoidance manoeuvre, one of the two primary engines that propelled the Lander was most likely lost. SLIM gradually descended with the other remaining engine, causing it to move east. JAXA is still investigating the internal and external causes behind the loss of main engine functionality. The landing velocity of 1.4m/s (5.04km/h) or less was below the Lander's design range. But taking into account that lateral velocity and altitude were out of design range, the unexpected results could be justified. The Lander's onboard software, which operates autonomously, identified the anomaly while controlling the horizontal position as much as possible.
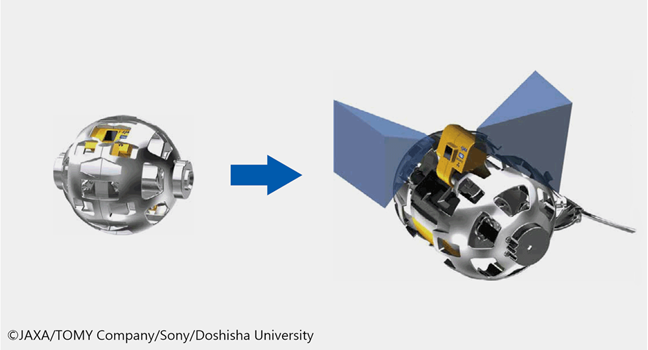
Communication with the spacecraft was established after landing. The SLIM was equipped with two small bots, Lunar Excursion Vehicle-1 (LEV-1) and Lunar Excursion Vehicle-2 (LEV-2 or SORA-Q). The LEV-1 successfully deployed from the Lander, received data from LEV-2, and transmitted it back to Earth stations. The LEV-1 includes the world's smallest and lightest communication device (weighing 90 grams) to successfully communicate with Earth from the Moon, a direct data transmission distance record around 380,000 km away. The LEV-2 or SORA-Q deployed and collected data from conducting activities while moving on the lunar surface and communicated the data through radio waves with its LEV-1. This transformative Lunar Robot is inspired by a child's toy called SORA-Q. It is no bigger than a tennis ball, and once deployed from the Lander, it becomes two halves with an LED, two cameras and a stabiliser to roll around its lunar surroundings. The communication between the two robots functions autonomously, and scientists consider the accomplishments of LEV-1’s leaping movement and inter-robot communication as groundbreaking.
The SLIM landed at a 90-degree rotation from the ideal rest position, and due to the spacecraft not being at the planned altitude after descent, the solar cells could not receive adequate light to power it. Earth station officially shut down the Lander at 2:57 am JST. The Lander faces west, giving the home base hope for revival once the sunlight direction changes. After draining its depleted power, LEV-1 is also in a standby state and awaits the same change. Reportedly, a week later, JAXA was able to re-establish communications once the lunar day dawned.
The JAXA Ham Radio Club (JHRC), JQ1ZVI, obtained an amateur radio licence JS1YMG for LEV-1, which has been transmitting Morse code on 437.41 MHz since January 19. As a unique outreach initiative for the general public, transmissions of ultrahigh band frequencies (UHF) from the LEV-1 have encouraged amateur radio operators to participate directly with the lunar expedition. The probe transmits "amateur business-related matters" via a 1 W UHF antenna with circular polarisation. There is no clear time frame on how long these radio waves will be heard.
Analysis
Lunar surface expeditions are as important as targeted research, which SLIM was designed to illustrate to be possible. With all the challenges the SLIM faced during landing, a 55m deviation from the target landing site is still phenomenal. Director general of JAXA's Institute of Space and Astronautical Science, Hitoshi Kuninaka, says that the project concludes with a success of a 100m landing distance from the targeted landing site. Using "vision-based navigation" and "navigation, guidance, and control", JAXA's SLIM sought to pinpoint the landing on the Moon.
Japan has demonstrated that it is possible to land on a desired location on the Moon's surface, which makes further space expedition and research a step closer to targeted study. Providing applications for the general public to be involved in such nationally significant endeavours is a massive public incentive, especially for the younger generations. It is an inspiring way to make national achievement of genuine national interest.
As we witnessed it on live television, India buzzed during the landing of Chandrayaan-3 on the Moon. However, autonomous communication between robots coupled with JAXA incentives must have made the whole journey for Japan an extended and united one. The successes will foster international collaborations in space research probes and foreign-directed investments towards greater achievements.
Assessment
- The loss of a main engine caused the landing error. However, JAXA's SLIM has demonstrated that pinpointed target landing is possible through "vision-based navigation". Clearly, technology is reaching a stage when unmanned space pods can make regular trips to the Moon to sustain Earth stations on its surface.
- The outreach initiative for the general public is a thoughtful national incentive for the younger generations to dapple into the aerospace domain and nurture inclusiveness in achievements.
- The accomplishment widens the scope for technology demonstration, future explorations, and international collaborations.






Comments